

Science Arm on Mars Sojourner Rover
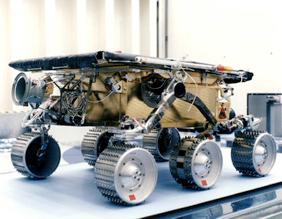

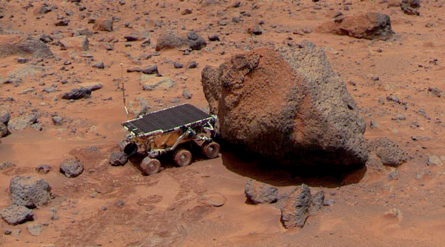
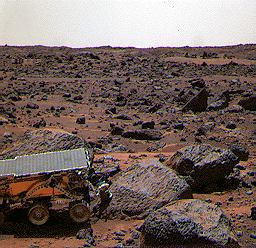
Engineering is creation. It is the task of recognizing a problem, discovering a solution, and developing a real-world implementation of that solution. On July 4, 1997, I had the opportunity to witness a creation of mine land on the surface of Mars. From the campus of the Jet Propulsion Laboratory, I watched as the anthropomorphic arm mounted on the back of the Sojourner rover extended and lowered a cup-like sensor to the ground, its conforming wrist aligning the sensor rim to the contour of the surface. Later, I was exhilarated to learn that the arm I created successfully placed the sensor on 15 rock and soil locations during Sojourner's months-long mission. After years of analysis, hardware development, and testing, I had the satisfaction to know that my hardware did its job.